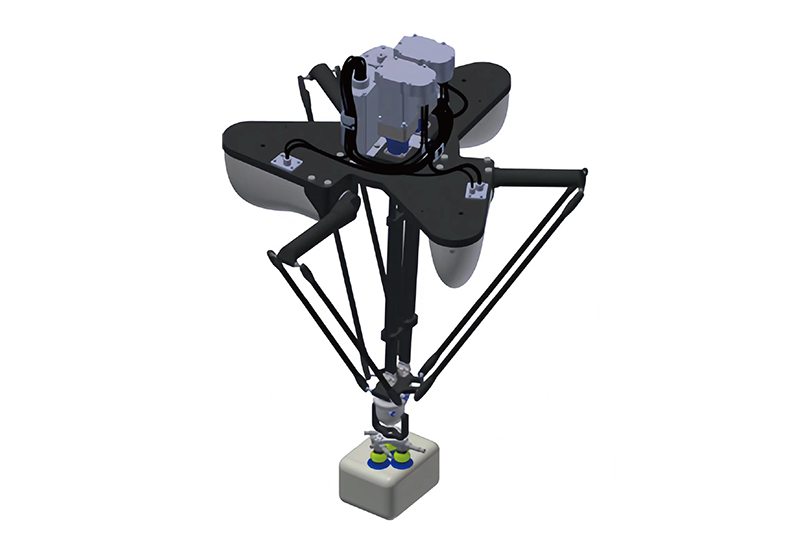
ระบบบูรณาการหุ่นยนต์เดลต้า
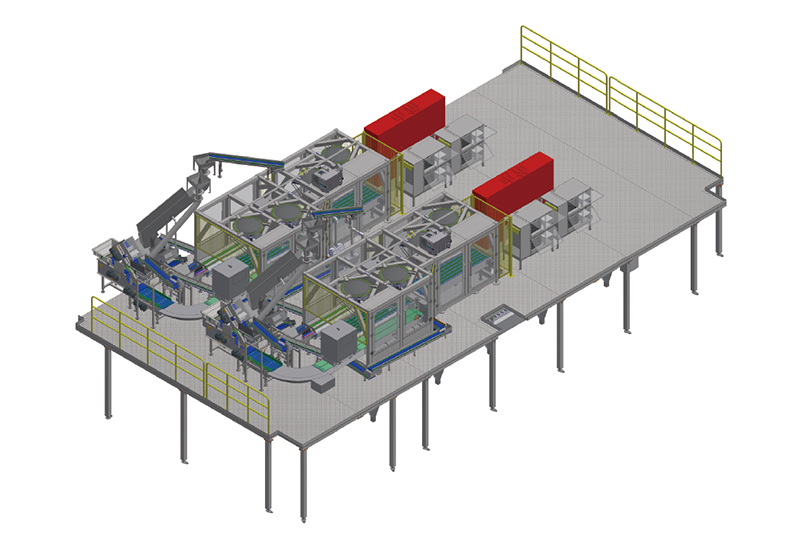
ผลิตภัณฑ์บรรจุภัณฑ์ภายในที่ไม่ได้เรียงลำดับจะถูกนำออกจากคลังสินค้า หลังจากถูกจัดเรียงโดยเซอร์โว ยูนิสแครมเบิล และระบบภาพจะรับรู้ตำแหน่งของผลิตภัณฑ์ ในระหว่างการทำงานของเครื่องบรรจุกล่อง ระบบภาพจะแบ่งปันข้อมูลกับหุ่นยนต์แมงมุม และหุ่นยนต์แมงมุมจะจับและวางผลิตภัณฑ์ลงในบรรจุภัณฑ์ภายนอกที่เกี่ยวข้อง
แอปพลิเคชัน
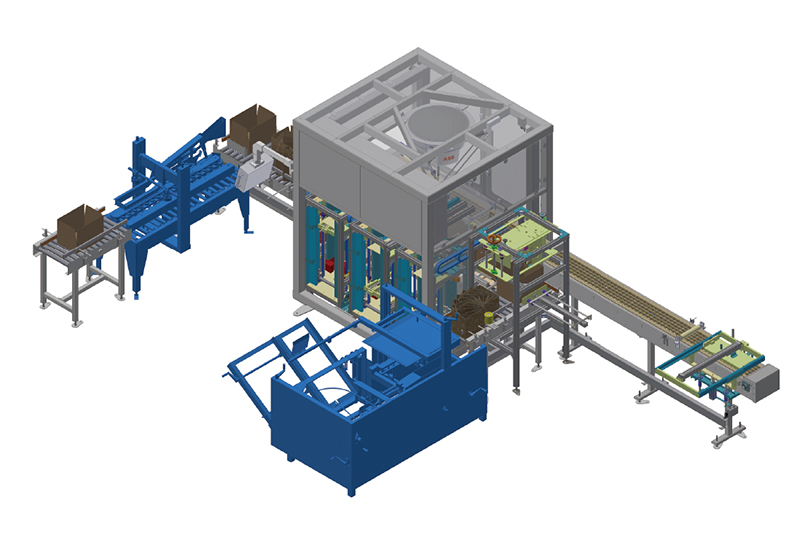
เหมาะสำหรับการคัดแยก ระบุ และหยิบผลิตภัณฑ์บรรจุภัณฑ์ภายในที่ไม่ได้เรียงลำดับในรูปแบบขวด แก้ว ถัง ถุง เช่น ชานมผง เส้นหมี่ บะหมี่กึ่งสำเร็จรูป ฯลฯ และจัดวางไว้ภายในบรรจุภัณฑ์ภายนอก
การวาดภาพ 3 มิติ


สายการบรรจุ
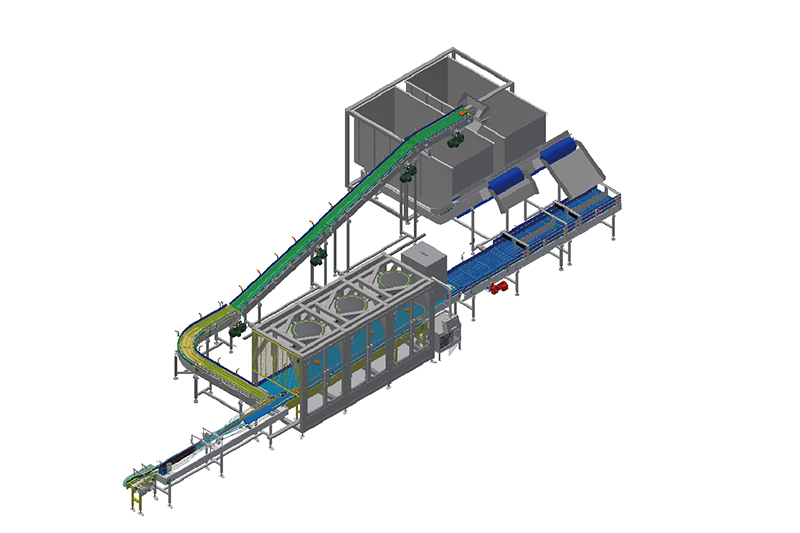
เส้นแยกสัญญาณ

การกำหนดค่าไฟฟ้า
| พีแอลซี | ซีเมนส์ |
| วีเอฟดี | แดนฟอสส์ |
| มอเตอร์เซอร์โว | เอเลา-ซีเมนส์ |
| เซนเซอร์โฟโตอิเล็กทริก | ป่วย |
| อุปกรณ์นิวเมติกส์ | เอสเอ็มซี |
| หน้าจอสัมผัส | ซีเมนส์ |
| อุปกรณ์แรงดันต่ำ | ชไนเดอร์ |
| เทอร์มินัล | ฟีนิกซ์ |
| มอเตอร์ | เย็บ |
พารามิเตอร์ทางเทคนิค
| แบบอย่าง | LI-RUM200 |
| ความเร็วคงที่ | 200 ชิ้น/นาที |
| แหล่งจ่ายไฟ | 380 AC ±10%,50HZ,3PH+N+PE |
วิดีโอแสดงเพิ่มเติม
- หุ่นยนต์เดลต้าสำหรับคัดแยก ป้อน แกะ และบรรจุกล่อง






