หุ่นยนต์ยกพาเลทออก
รายละเอียดสินค้า
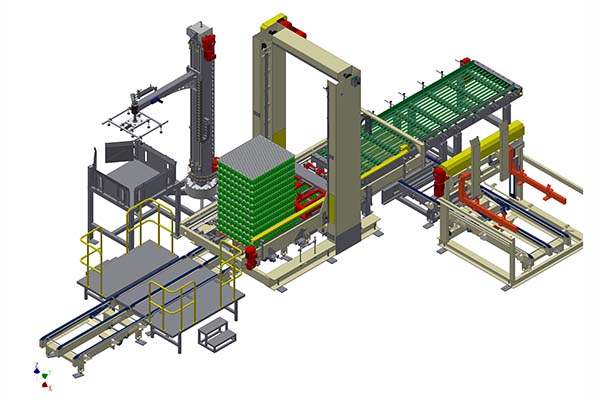
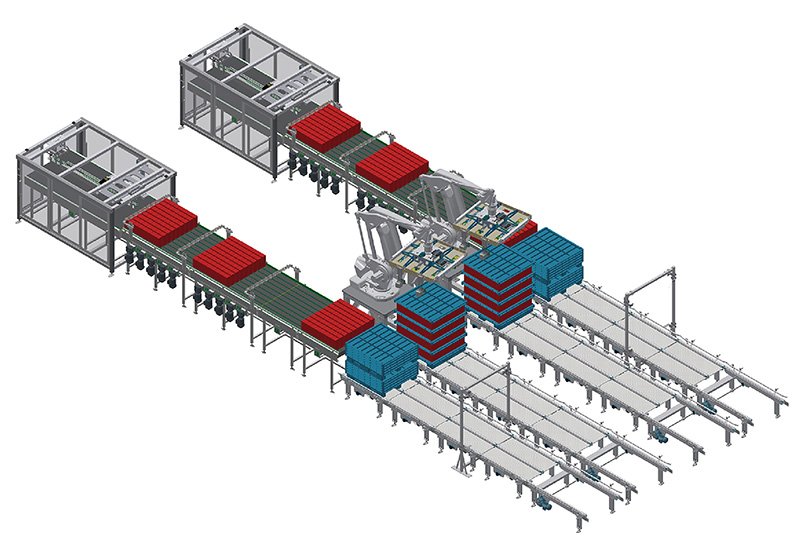
ในระหว่างการผลิต กองผลิตภัณฑ์ทั้งหมดจะถูกขนส่งด้วยสายพานลำเลียงแบบโซ่ไปยังสถานีนำพาเลทออก และกลไกการยกจะยกพาเลททั้งหมดขึ้นไปที่ความสูงที่จะนำพาเลทออก จากนั้นอุปกรณ์ดูดแผ่นระหว่างชั้นจะหยิบแผ่นและวางลงในที่เก็บแผ่น หลังจากนั้น แคลมป์ถ่ายโอนจะย้ายชั้นผลิตภัณฑ์ทั้งหมดไปที่สายพานลำเลียง ทำซ้ำขั้นตอนข้างต้นจนกว่าจะเสร็จสิ้นการนำพาเลทออกทั้งหมด และพาเลทเปล่าจะส่งไปที่ตัวรวบรวมพาเลท
แอปพลิเคชัน
เหมาะสำหรับการขนถ่ายกล่อง ขวด PET ขวดแก้ว กระป๋อง ถังพลาสติก ถังเหล็ก ฯลฯ โดยอัตโนมัติ
การจัดแสดงสินค้า


การวาดภาพ 3 มิติ

การกำหนดค่าไฟฟ้า
| แขนหุ่นยนต์ | เอบีบี/คูก้า/ฟานัค |
| พีแอลซี | ซีเมนส์ |
| วีเอฟดี | แดนฟอสส์ |
| มอเตอร์เซอร์โว | เอเลา-ซีเมนส์ |
| เซนเซอร์โฟโตอิเล็กทริก | ป่วย |
| อุปกรณ์นิวเมติกส์ | เอสเอ็มซี |
| หน้าจอสัมผัส | ซีเมนส์ |
| อุปกรณ์แรงดันต่ำ | ชไนเดอร์ |
| เทอร์มินัล | ฟีนิกซ์ |
| มอเตอร์ | เย็บ |
พารามิเตอร์ทางเทคนิค
| แบบอย่าง | LI-RBD400 |
| ความเร็วในการผลิต | 24000 ขวด/ชั่วโมง 48000 ฝา/ชั่วโมง 24000 ขวด/ชั่วโมง |
| แหล่งจ่ายไฟ | 3 x 380 AC ±10%,50HZ,3PH+N+PE |
วิดีโอแสดงเพิ่มเติม
- หุ่นยนต์แยกพาเลทขวดพร้อมสายแยกและรวม
- หุ่นยนต์ถอดพาเลทกล่องพร้อมเส้นแบ่งและเส้นรวม